PHASE-3
The final phase of my rover project involved
gathering the last materials(4WD chassis and remaining parts),
assembling the components, and completing the autonomous rover.
Materials
For the final preparation of my rover, I integrated a 4WD chassis as the foundation. This chassis features four DC gearmotors, chosen to ensure reliable performance in various environmental conditions.
Accompanying this, I installed a battery holder capable of powering without interruption, providing the necessary energy for sustained operations. Complementing these components are durable tires, to traverse diverse terrains with ease, enhancing the rover's mobility and adaptability.
All of these components were aimed to create a rover that meets the challenges of its environment. Each component contributes to the overall performance, reliability, and endurance, ensuring the rover is well-equipped to accomplish its objectives.
Rover Assembly
After gathering all the materials, the next step was assembling everything. Initially, the focus was on connecting the tires, motors, and chassis body to establish the foundation of the rover.
Following the mechanical assembly, attention shifted to integrating the circuitry that forms the intelligence and control center of the rover. This involved connecting components such as the motor driver, Arduino, and power supply batteries. Once the physical and electronic integration was complete, the next steps involved testing and calibration of the entire system, calibrating the motor driver settings, adjusting sensor thresholds etc.
The constants in the code provide clear and meaningful names for the connections and operational parameters, enhancing code readability and maintainability while facilitating precise control over the rover's functions.
Finalization
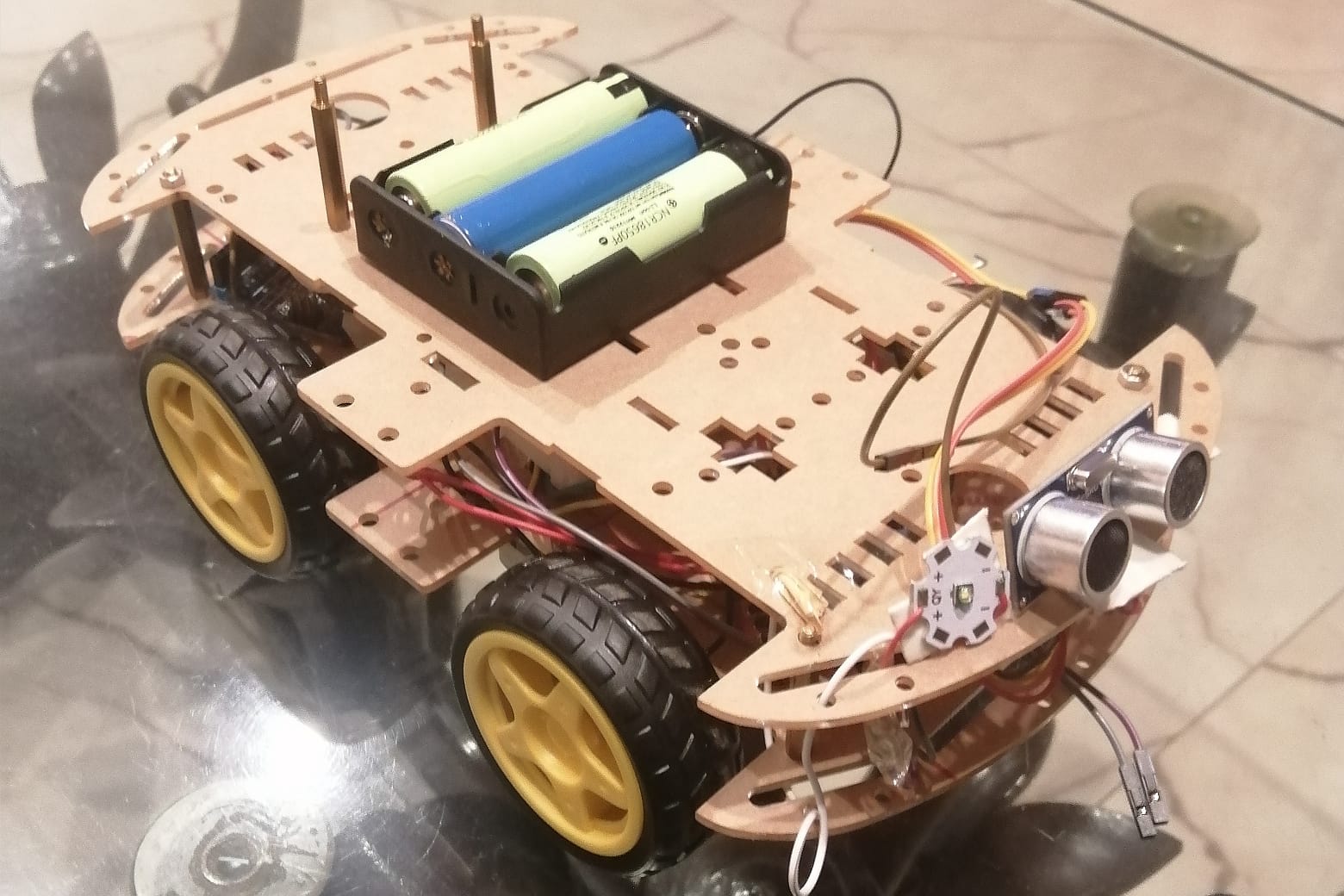
With the installation of the top chassis, integrating key components such as the ultrasonic sound sensor for distance measurement, the Light Dependent Resistor (LDR) paired with an LED for light detection, and other essential modules, the rover reaches its final stage of assembly. These components collectively enhance the rover's capabilities, enabling it to perceive its surroundings intelligently and respond autonomously.
Its autonomous movement capabilities allow it to navigate and explore its environment independently, adapting to obstacles detected by the ultrasonic sensor with precision. The automatic lighting system, controlled by the LDR, ensures optimal visibility in varying light conditions, enhancing its operational efficiency.
This code demonstrates a simple yet effective obstacle avoidance strategy for a rover:
- It continuously checks the distance to an obstacle using an ultrasonic sensor.
- If an obstacle is detected within a specified range (MAX_DISTANCE), it stops the rover, selects a random direction (left or right), and turns accordingly to avoid the obstacle.
- If no obstacle is detected, it continues moving forward.