About Me

Hey! 👋 My name is Elishah John. I'm a 15-year old, aspiring to become an astronomer.
My main interests (other than sitting in a corner)
are physics, coding, robotics/machine Learning.
Project
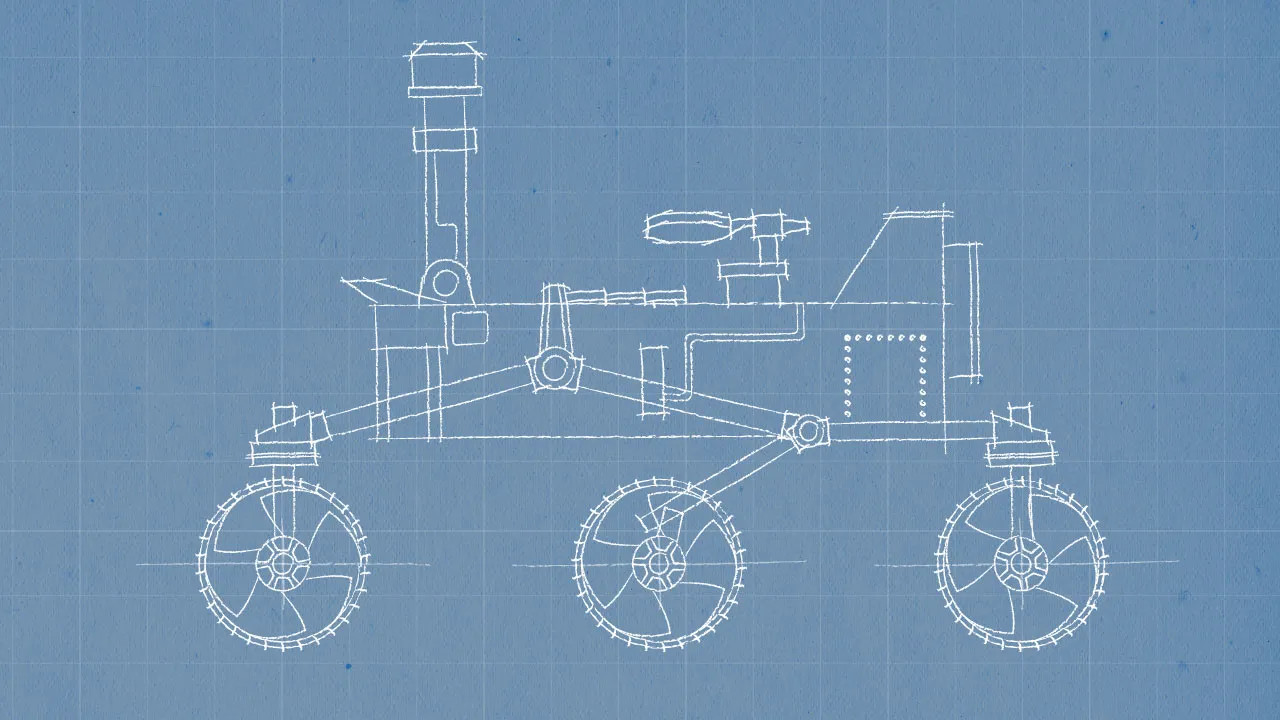
I am currently working on building a functioning rover using arduino.
Inspired by the design of the Curiosity rover, every step of the process, from initial design and testing to the final construction of the rover, will be documented on this page.
Key Features:
• Autonomous navigation capabilities
• Ability to traverse all types of terrain
• Integrated camera module for real-time visual feedback
• Automated lighting system for optimal visibility
Phase 1: Prototyping-Base
May 6, 2024
Gathering Materials
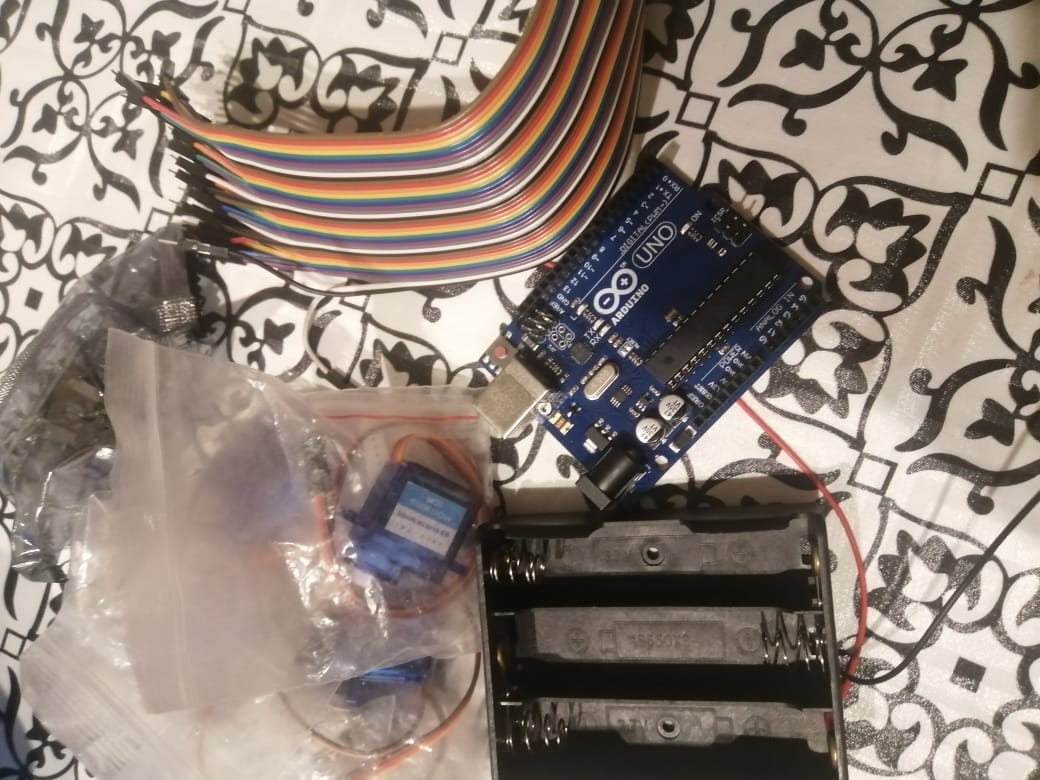
Arduino, micro servos, joystick, jumper wires are main components of the base of the rover. The initial code to set up the arduino and servos is the following:
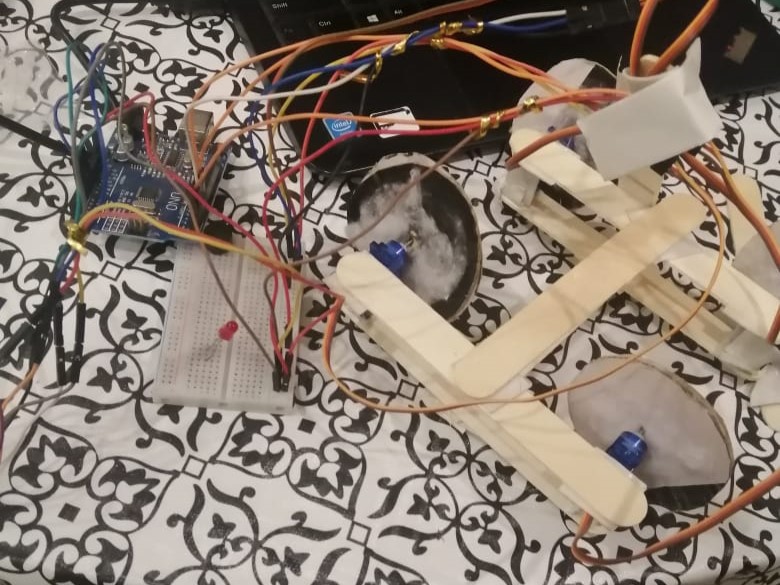
Main purpose of this prototype was just to see how these servo motors will perform. The problem with this design is its structural integrity and space to place the arduino and breadboard or the body in general.
The following code is used to control the servos:
May 14, 2024
Prototype-II
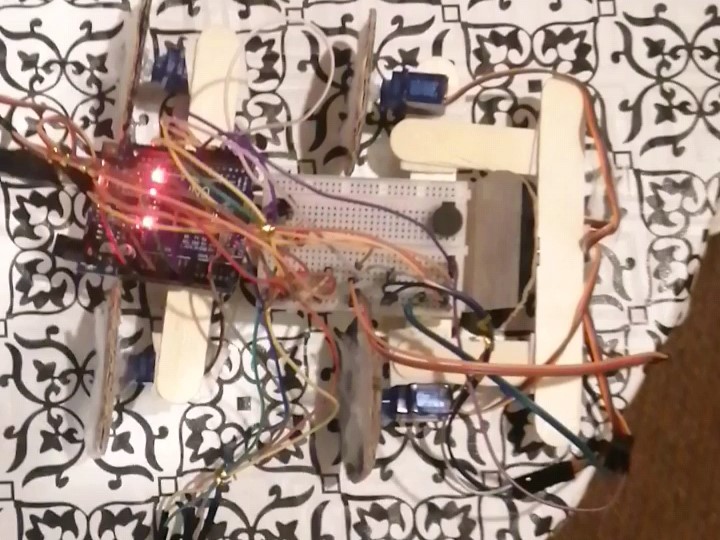
This design fixes the main issue with Prototype-I, which was space but, structural integrity is still something I need to work on. Duct tape usually solves all the problems in life, except this one.
The code used for the servos is the same as the previous one:
Phase 2: Sensors
May 18, 2024
Ultrasonic Sound Sensor

Ultrasonic sound sensor is used to start making this prototype autonoumous. The sensor is connected to the servos such that, if the distance is less than a certain value, the servos move back.